斯坦福大学的研究人员近日推出了Mobile ALOHA,这是一款创新的双手移动操纵器,为低成本机器人平台带来了先进的移动操作能力。基于经济实惠的ALOHA(低成本开源硬件)双手远程操作系统,Mobile ALOHA结合了机动性和全身控制,可以执行像烹饪、清理和人机交互等复杂的现实任务。
通过增加移动底座、灵巧的机械臂和直观的全身远程操作界面,Mobile ALOHA为研究人员提供了一个可访问的实验平台,用于推动移动操作的发展。该系统的成本不到32,000美元,包括板载电源和计算,远远低于可比较的移动操纵器。
传统上,机器人研究,特别是在模仿学习领域,一直局限于静态的桌面操作。然而,Mobile ALOHA通过将机动性与双手、全身控制相结合,克服了这些限制。
Mobile ALOHA继承了ALOHA的以人为本的设计,通过可驱动的臂部实现对其14个自由度的类似操纵者的控制。关键是,Mobile ALOHA通过一个人体工程学的腰部系绳,允许对臂部、底座和手腕相机进行同时控制,实现无缝的全身演示。
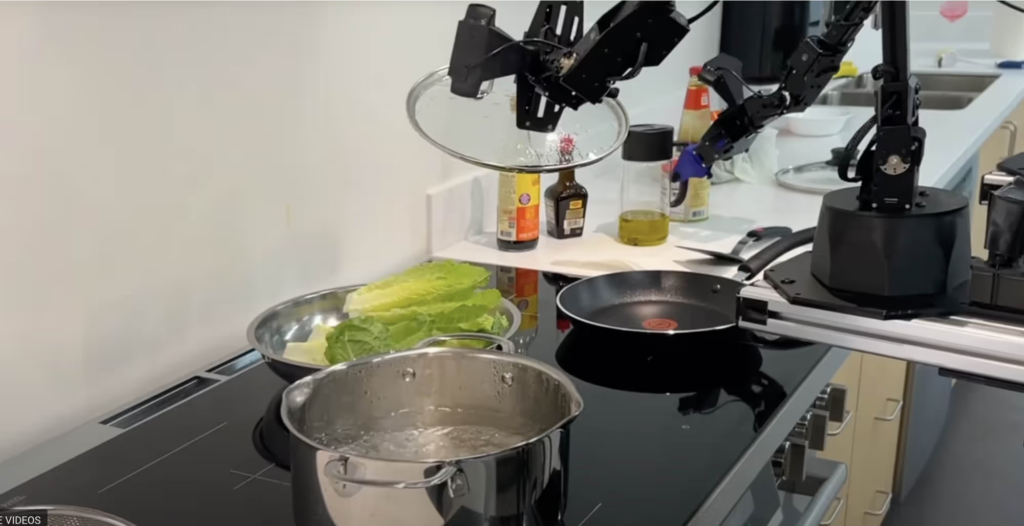
Mobile ALOHA设计的关键在于通过监督行为克隆来模仿复杂的现实任务。通过使用演示和与静态ALOHA数据集的联合训练,该系统在复杂任务中表现出色。例如,它可以高效地执行诸如烹饪、乘坐电梯,甚至是家务等活动,仅通过每项任务50个演示,成功率提高了90%。
Mobile ALOHA的开发解决了机器人领域的两个主要挑战。首先是成本障碍:高质量的双手移动操纵器过去往往价格昂贵,通常超过20万美元。Mobile ALOHA打破了这个障碍,以较低的成本提供了可行的替代方案。其次,它解决了高性能双手移动操作的复杂性问题。模仿学习与低成本平台的集成使Mobile ALOHA成为广泛研究和实际应用的有吸引力选择。
Mobile ALOHA设计的核心有四个关键元素:
- 机动性:能够以人类步行速度移动,提高在动态环境中的任务效率。
- 稳定性:即使处理重物时也保持稳定,这是家庭任务中的一个关键因素。
- 全身远程操作:系统使所有部件能够同时进行控制,提供无缝的用户体验。
- 无绳操作:其板载电源和计算功能使其摆脱外部依赖,增加了其操作范围。
值得注意的是,研究人员通过将移动操作数据与ALOHA的现有静态双手数据集相结合,展示了显著的性能提升。尽管在形态和任务上存在显著差异,但这种“联合训练”提供了有用的先验知识,将成功率在烹饪虾、擦拭洒在桌子上的葡萄酒和推椅子等活动中提高了90%。
该研究突显了Mobile ALOHA的多功能性、与主流模仿学习算法的兼容性以及依赖全身协调完成长时间任务的能力。尽管如此,即使对非专业人士来说,用户在不到5次试验中就能够可靠地达到专业级的远程操作熟练程度。其开源设计应该能够鼓励研究人员进一步探索灵活机动性的边界,并继续朝着可靠且经济实惠的移动操作目标迈进。
本文来自投稿,不代表TePhone特锋手机网立场,如若转载,请注明出处:https://www.tephone.com/article/3852
